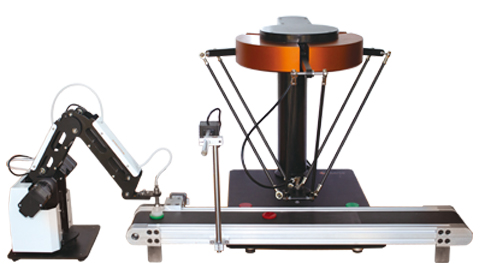
Delta并联机器人实验平台
日期:2021-05-17 作者:睿景时代 分类:AI+控制原理
一、产品概述
Delta 并联机器人是具有三个自由度,以并联方式驱动的一种闭环机构,在工业场合应用极为广泛。并联机器人由于其机构的特点,其优点呈现为无累积误差,精度较高、速度快、动态响应好。特别是无累积误差的优点,适合机器人运动学原理验证平台。支持完成机器人运动学、机器人轨迹规划、机器人技术核心知识点实验,平台配置视觉相机、传动带模组等,融入机器人控制系统、视觉图像处理、数字孪生技术、人工智能等相关知识,适合机器人工程、机电相关专业开展教学实验、综合实践、创新应用。
二、产品特点
1.产品级设计、工业级配置
桌面型Delta并联机器人,外观精致,主控器为工业级PLC,稳定性好,定位精度高,自主设计,为教学而生。
2.聚焦机器人技术重要知识点验证
不需要ROS系统,C++等编程知识储备,Python环境下建模,实物平台完成机器人运动正逆解、插补、空间轨迹规划等重要知识点验证。
3.机器人平台开源智能
提供开放版、专业版两版实验软件,开放版支持Python环境下代码全开源,专业版操作更便捷。支持基于深度学习的图像处理实践。提供基于数字孪生技术的仿真软件,实现随动*。
4.基础实验,综合实践项目丰富
支持机器人运动学实验、支持图像处理实验。结合视觉相机、传动装置等完成更多综合实践项目。
三、实验项目
1.机器人运动学建模正解实验
2.机器人运动学建模逆解实验
3.关节空间轨迹规划实验(二次多项式规划、三次多项式轨迹规划、五次多项式轨迹规划、抛物线过渡的线性段)
4.笛卡尔坐标空间的平面直线轨迹规划实验
5.笛卡尔坐标空间的平面圆弧轨迹规划实验
6.笛卡尔坐标空间的空间直线轨迹规划实验
7.基于颜色的静态工件分类抓取实验
8.基于形状的静态工件分类抓取实验
9.基于颜色的动态工件分类抓取实验
10.基于G代码绘画实验
11.基于深度强化学习的五子棋实验
四、软件界面





©2021 睿景时代(大连)科技有限公司 辽ICP备2021003980号-1 技术支持 - 资海科技集团